-
An Assistive Robotic System with a Robotic Bed and a Mobile Manipulator
Ariel Kapusta, Philip Grice, Henry Clever, Yash Chitalia, Daehyung Park, Charles C. Kemp
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017) (submitted)
-
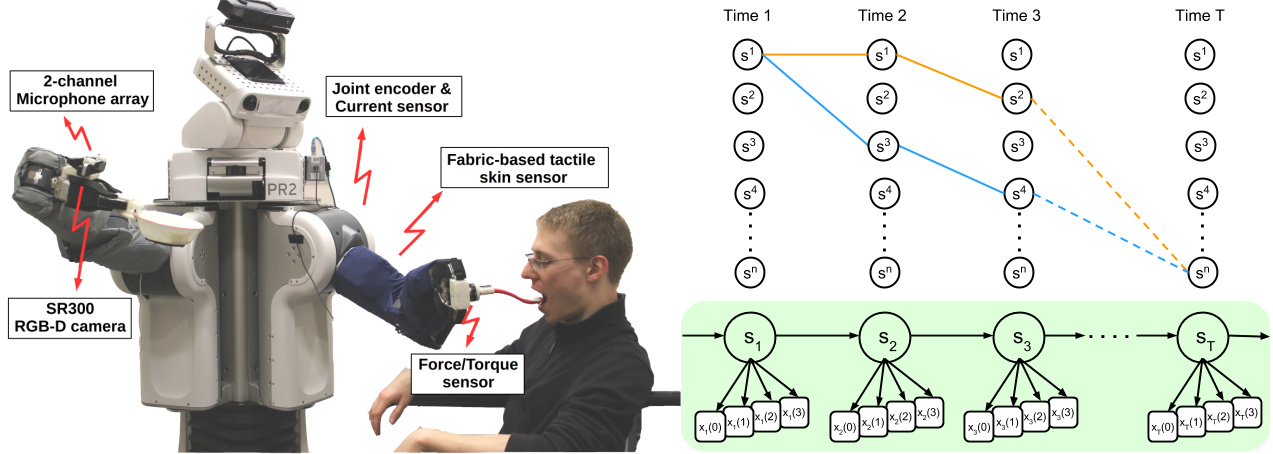
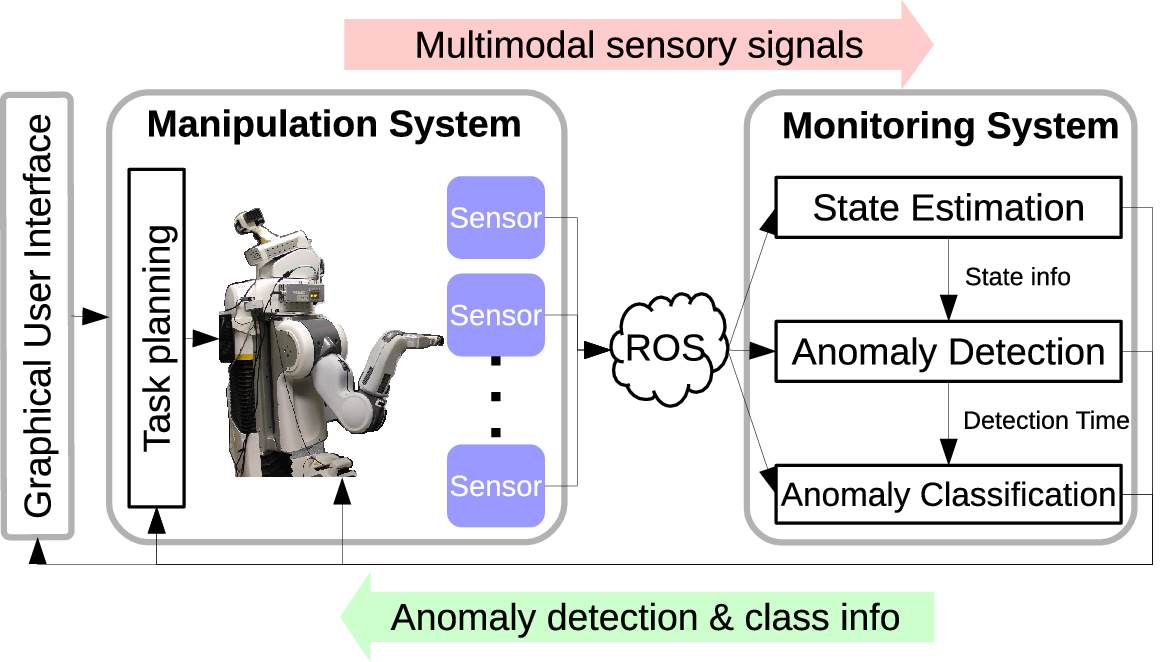
Multimodal Anomaly Detection for Assistive Robots
Daehyung Park, Hokeun Kim, Charles C. Kemp
In Autonomous Robots (submitted)
-
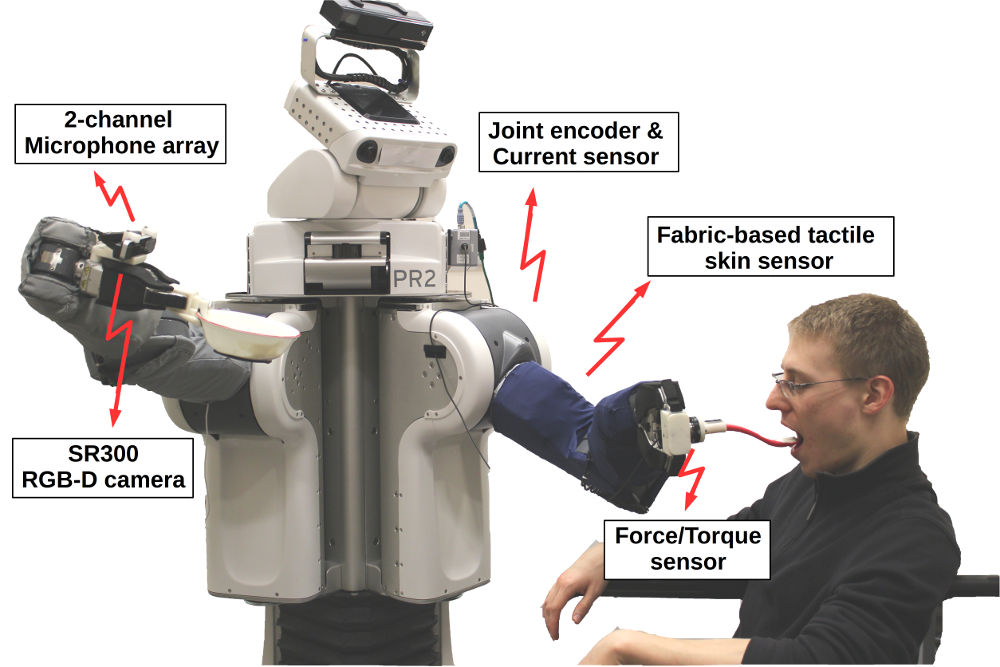
Multimodal Execution Monitoring for Robot-Assisted Feeding
Daehyung Park, Hokeun Kim, Yuuna Hoshi, Zackory Erickson, Ariel Kapusta, Charles C. Kemp
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017) (submitted)
-
Multimodal Execution Monitoring for Robot-Assisted Feeding
Daehyung Park, Charles C. Kemp
In TechSAge State of the Science Conference, 2017
-
Collaboration Between a Robotic Bed and a Mobile Manipulator May Improve Physical Assistance for People with Disabilities
Ariel Kapusta, Yash Chitalia, Daehyung Park, Charles C. Kemp
In RO-MAN 2016 Workshop on behavior adaptation, interaction and learning for assistive robots (BAILAR 2016)
-
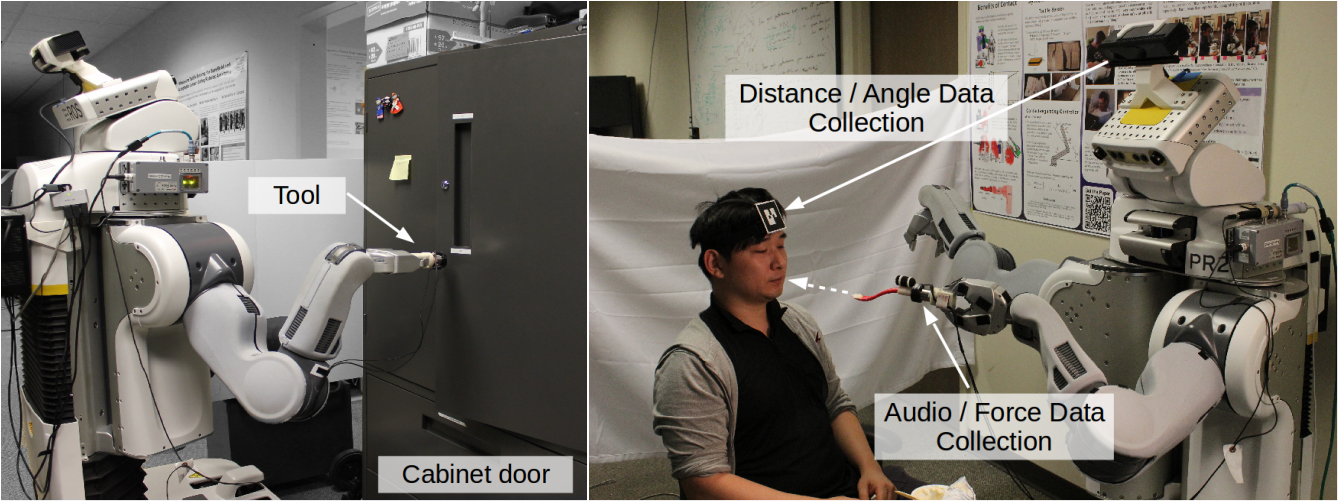
Multimodal Execution Monitoring for Anomaly Detection During Robot Manipulation
Daehyung Park, Zackory Erickson, Tapomayu Bhattacharjee, Charles C. Kemp
In IEEE International Conference on Robotics and Automation, 2016. (ICRA2016)
-
Towards Assistive Feeding with a General-Purpose Mobile Manipulator
Daehyung Park, Youkeun Kim, Zackory Erickson, Charles C. Kemp
In ICRA2016 workshop on Human-Robot Interfaces for Enhanced Physical Interactions
-
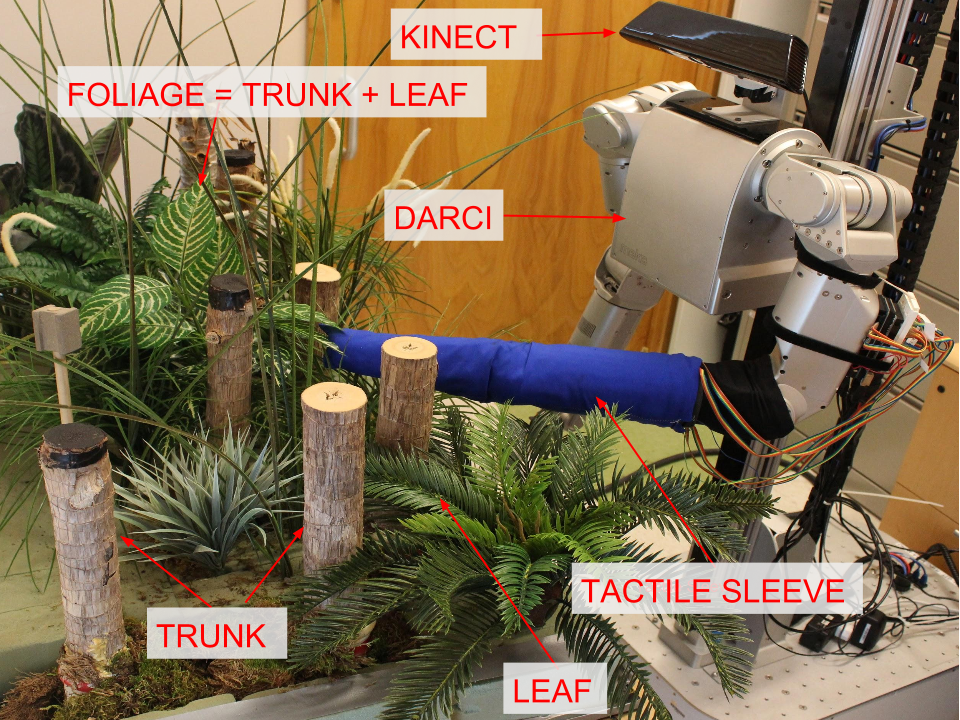
Combining Tactile Sensing and Vision for Rapid Haptic Mapping
Tapomayukh Bhattacharjee, Ashwin A. Shenoi, Daehyung Park, James M. Rehg, Charles C. Kemp
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015
-
Task-Centric Selection of Robot and Environment Initial Configurations to Perform Assistive Tasks
Ariel Kapusta, Daehyung Park, James M. Rehg, Charles C. Kemp
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015
-
Interleaving Planning and Control for Efficient Haptically-guided Reaching in Unknown Environments
Daehyung Park, Ariel Kapusta, Jeffrey Hawke, Charles C. Kemp
In IEEE-RAS International Conference on Humanoid Robots (Humanoids 2014)